artwork by NVIDIA (Omniverse / Isaac Sim warehouse demo)
Baudrillardian Digital Twin - Engineering Against Hyperreality
A digital twin starts out as a faithful mirror of a factory floor. Over time, the relationship inverts. The factory begins to be reshaped so that the twin can render it cleanly. Wooden pallets get painted neon green because the computer-vision system cannot otherwise distinguish them from a grey concrete floor. In this article, we apply Jean Baudrillard’s Simulacra and Simulation to the engineering of digital twins, walking the four orders of the sign through generic engineering practice with NVIDIA’s Omniverse industrial AI stack as a worked example in sidebars, and we end with a hybrid checklist that pairs philosophy with concrete decision rules so the twin remains a representation rather than a quiet replacement of the physical world it was meant to describe.
When the Pallets Get Painted Green
Think for a moment about the last heavily filtered photo we saw on social media. The skin was impossibly smooth, the lighting flawless, the background blurred to a creamy nothing. We knew, looking at it, that the image was not strictly true. We accepted it anyway as the functional representation of the person. We replied to it as though it described someone real.
Now scale the same operation up.
Replace the selfie with the digital representation of a multi-million-dollar factory floor. The dashboard looks flawless. The machinery hums in clean isometric strokes. The supply lines all glow a calming green. What if that digital filter is quietly hiding a physical disaster on the floor below? And what if the floor itself has started to change shape, slowly, so that the filter can keep doing its work?
A story that has actually happened in industrial automation: a computer-vision system in a warehouse cannot reliably distinguish grey wooden pallets from a grey concrete floor. The engineering response is not necessarily to improve the cameras, the lighting, or the dynamic range of the model. It is sometimes much cheaper to repaint the physical pallets in neon green. From a budget perspective this is rational. From a Baudrillardian perspective it is a small earthquake. The map is dictating the territory. The factory is being sanded down to suit the dashboard.
The whole inversion on one page:
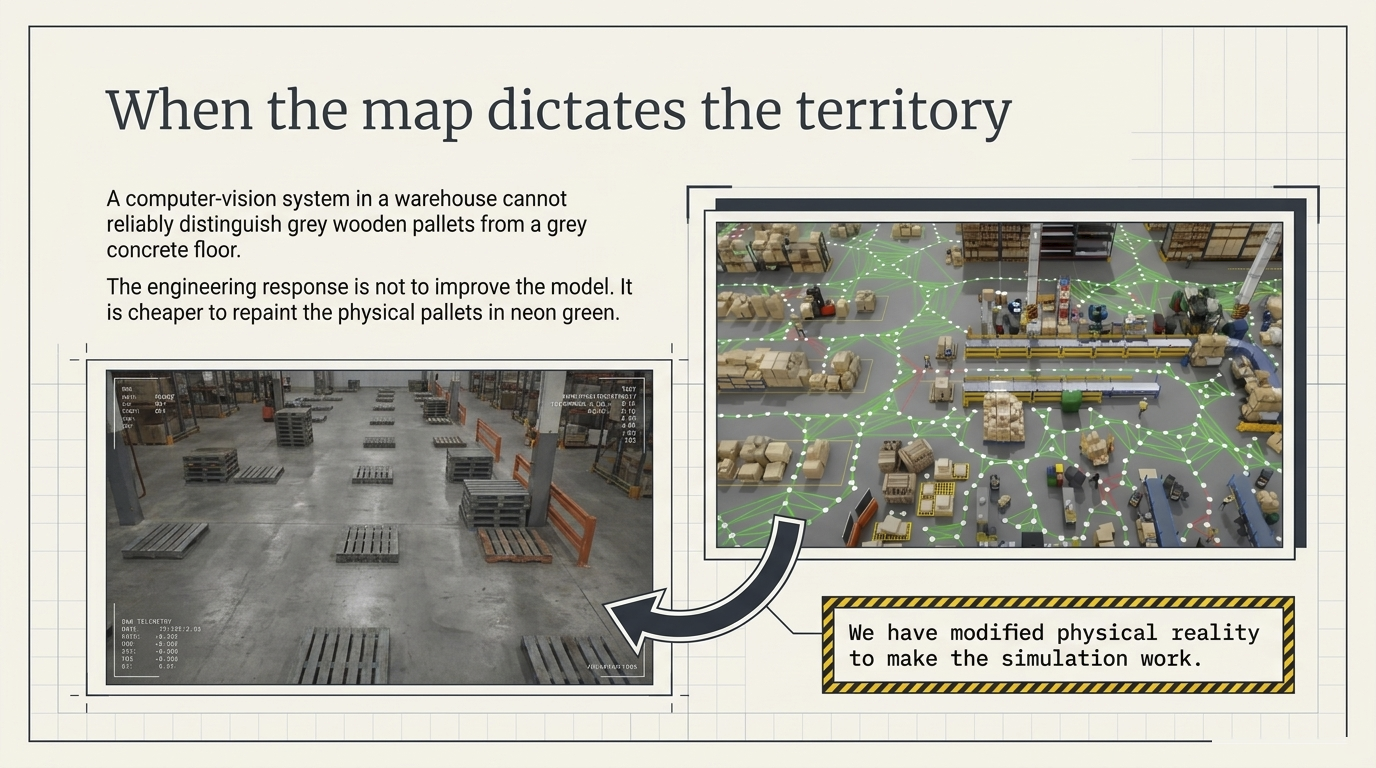
Figure. The two panels are cause and effect, not before-and-after. The unreadable floor on the left is the condition under which the dashboard on the right has to operate. The caution-tape line is what becomes visible only when you read the two panels as a single object.
This article is about how that drift happens, how to see it as it happens, and how to build digital twins that stay honest about what they actually know. We will use Jean Baudrillard’s 1981 Simulacra and Simulation as the diagnostic lens, pair every philosophical concept directly with the engineering vulnerability it names, and pair every vulnerability with a concrete decision rule that defends against it. Each Order section is in two layers: a generic body that any digital-twin team can read, and a sidebar that grounds the same point in NVIDIA’s Omniverse industrial AI stack. The aim is to read each layer through the other.
The route from here: a short introduction to Baudrillard’s move, a vocabulary note on the NVIDIA stack, then four sections for the four orders. After that, the two subtler vulnerabilities (seduction and the implosion of meaning), an engineering checklist that ties the defences together, and a closing accounting of what the philosophical framing actually adds to the work.
The Move Baudrillard Makes
Baudrillard’s central claim, in plain language, is that representations of reality have come unhooked from the reality they were supposed to represent. Maps used to serve territories. Photographs used to serve moments. Models used to serve the physical systems they described. In Baudrillard’s reading of late-twentieth-century culture, that relationship inverts. The model now comes first, and the territory reorganises itself to look more like the model.
The neon-green pallets are exactly this inversion, in literal paint.
Once the inversion has fully completed, we live in what Baudrillard calls hyperreality. The hyperreal is not “fake” in any naive sense. It is not a Matrix-style illusion. It is the working surface on which decisions are made, value exchanged, identities formed. The danger is not that someone is actively deceiving us. The danger is that nobody needs the original physical reference any more. The layer of signs is faster, more vivid, and more operational, and decisions migrate to it without anyone having to argue for the move.
To diagnose how a particular sign came loose from its referent, Baudrillard offers a taxonomy of four orders. These are not chronological phases. They coexist. Any given sign is operating in one of them at any given moment, and the practical work is to ask which.
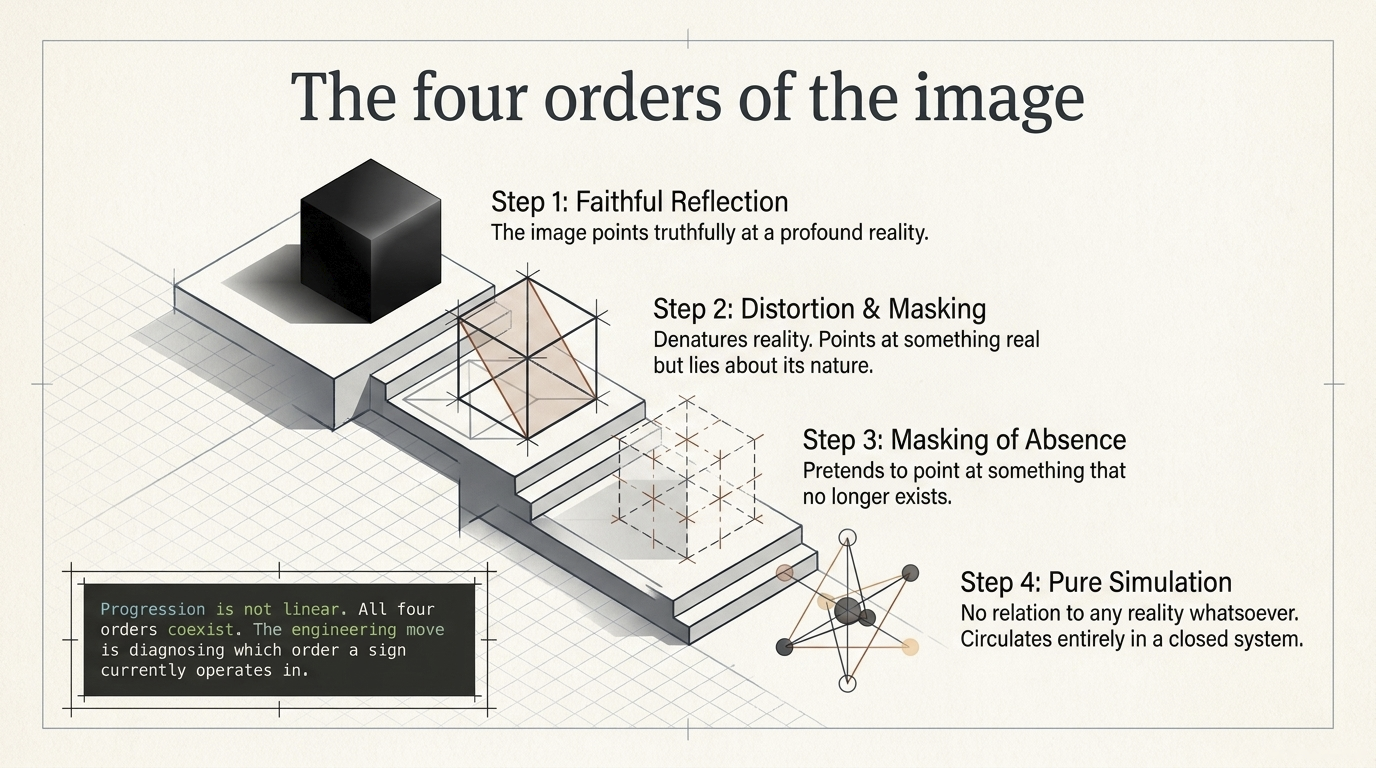
Figure. The four icons are conceptual portraits, not a timeline. The relation between sign and referent erodes step by step, from solid cube to network, but all four orders coexist in any working system. The practical reading task: pick any dashboard, alarm, or twin element, and decide which of the four it is currently operating in.
The four orders are the spine of the article that follows. We will not introduce them all at once and then come back to engineering later. We will walk one order at a time and, in the same breath, pair it with the generic engineering manifestation, the generic engineering defence, and a sidebar grounding the same content in the NVIDIA stack.
A working twin does not stay neatly in Order 1. The architectural pressure of an operational system pushes it through the orders over time. The most dangerous slippage is between Order 2 and Order 3, where the twin stops merely distorting the data it has and starts asserting the existence of data it does not have. The framework’s job is to make that slippage visible early enough to do something about it. To do that work concretely, the next section introduces the names the NVIDIA stack uses for the components the worked example will exercise.
A Vocabulary Note: The NVIDIA Industrial AI Stack
Readers familiar with Omniverse, Isaac, Metropolis, and cuOPT can skip to the next section. For everyone else: the NVIDIA names appear mostly in the NVIDIA instantiation sidebars below, so this is the one place that has to land cleanly.
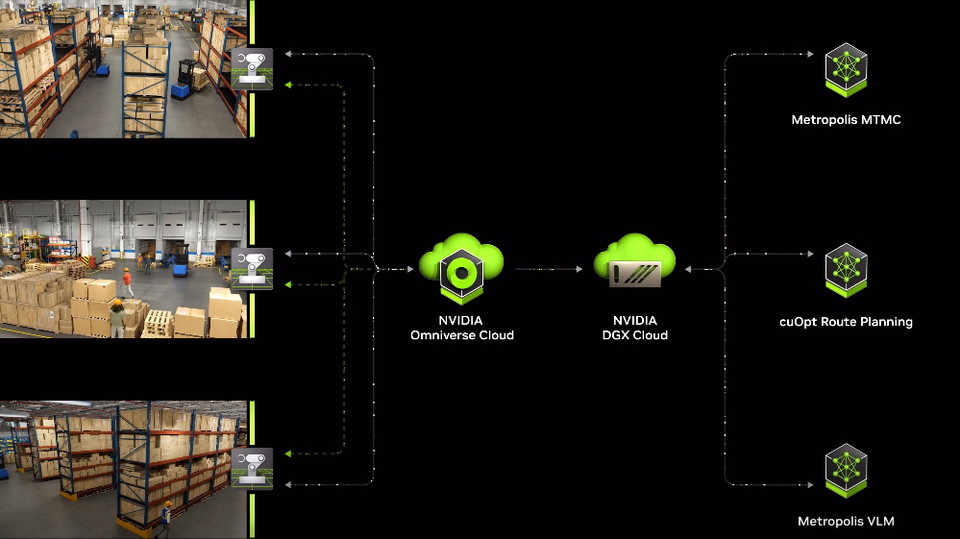
Figure. Read the arrows left to right and the abstraction climbs one floor per arrow. By the time MTMC, cuOPT, or VLM are speaking, the physical floor is two transformations away. Each downstream box is a place where a new order of sign can quietly take root.
| Component | What it is | What it produces in the warehouse demo |
|---|---|---|
| Omniverse | Simulation platform on OpenUSD; the visual surface the operator sees | The 3D scene graph mirroring the 100,000-square-foot warehouse |
| Isaac | Robotics layer: Isaac Sim (simulator), Isaac Perceptor (on-AMR multi-sensor stack), Isaac Mission Control (fleet coordinator) | Per-AMR perception and the command channel from twin to physical fleet |
| Metropolis | Vision AI platform; MTMC (Multi-Target Multi-Camera tracking) fuses cameras; VIA (Visual Insight Agent) handles natural-language queries | The live occupancy map fused from 100 ceiling cameras |
| cuOPT | GPU-accelerated routing optimiser; sub-second response, multi-constraint | The optimal AMR route graph consumed by Mission Control |
Together the four constitute what NVIDIA calls the AI Gym: a single environment in which robots, agents, and routing strategies are trained and evaluated before anything touches the physical floor. The AI Gym is, structurally, a Baudrillardian object of unusual purity, and most of the engineering analysis below turns on how it slips through the four orders. The framework applies to any industrial digital twin with sensor fusion and downstream actuation; we use NVIDIA’s stack because it is the most-documented public demonstration.
The Order sections that follow can be previewed as a single table. Each row is the territory of one section.
| Order | Philosophical mode | NVIDIA-stack manifestation |
|---|---|---|
| 1: Faithful reflection | Sign points truthfully at its referent | 100 ceiling cameras feed Metropolis MTMC; each AMR runs Isaac Perceptor; the twin renders what the floor just showed |
| 2: Distortion and masking | Sign points at something real but renders it more cleanly than the data warrants | MTMC confidence drops in sparsely covered zones; the Metropolis occupancy map renders smoothly anyway |
| 3: Masking the absence | Sign asserts a state for which no current evidence exists | A ceiling camera drops; Metropolis fills aisle 7 from a schedule prior and a stale MTMC track |
| 4: Pure simulation | Sign refers only to other signs in a closed loop | The AI Gym: cuOPT routing agents trained inside Omniverse, then deployed against the physical floor as a downstream rollout |
Order One: Faithful Reflection
The first order is the clear mirror. The sign points truthfully at what it depicts.
In a freshly commissioned digital twin this is the demo state: dense calibrated sensors, near-real-time streaming, the twin displays exactly what the floor displays. Most vendors claim this as the steady-state behaviour of their product, and on day one of a clean deployment it is often true.
The engineering defence of Order 1 is, fundamentally, provenance. Every quantity inside the twin should carry its source. The dashboard should not just say worker present in zone A. It should say which sensor (or fused set of sensors) detected the worker, when the last update arrived, and whether the assertion was made by a live fused track, a cached prior, a simulator estimate, or a default model.
# Pseudo-code rule. Every reading is a structured object, not a scalar.
reading = {
value: "worker_present",
zone: "zone_A",
source: "fused_tracker.live",
contributing_sensors: ["sensor_01", "sensor_02", "sensor_03"],
measured_at: "2026-05-31T14:23:11Z",
freshness_ms: now() - measured_at,
derivation: "live" # one of: live, smoothed, simulated, cached, default
}
The single most useful rule that follows: the operator’s UI should never render a value without rendering its provenance alongside it. A source and derivation that are not displayed will not be checked. A freshness_ms that lives only in the backend will not influence decisions. Most twin platforms already expose this metadata internally; the engineering discipline is to surface it in the operator view, not to bury it.
A diagnostic test for an Order-1 system: ask the natural-language query interface the same question twice, ten seconds apart. Both answers should cite the sensors and the timestamps that supported them. If either answer drops the citation and just states the claim, the agent has already moved a small step downstream toward the later orders.
NVIDIA instantiation. In a freshly commissioned Omniverse warehouse twin, the Order-1 state ships in the GTC keynote video. The floor is wrapped in 100 simulated ceiling cameras whose streams Metropolis MTMC fuses into a live occupancy map. Each AMR runs Isaac Perceptor with six on-board sensors. cuOPT recomputes the route graph as the occupancy map updates. The provenance rule above specialises here to readings whose
sourcefield readsmetropolis.mtmc.fused, whosecontributing_sensorsare explicit camera IDs (cam_023,cam_024,cam_048), and whosederivationis one of the same five values. The Order-1 diagnostic test specialises to: ask the Visual Insight Agent the same question twice, ten seconds apart, and confirm both answers cite the supporting cameras and timestamps.
Order Two: Distortion and Masking
The second order is the funhouse mirror. The sign still points at something real, but lies about it. Baudrillard calls this ideology: distortion in the service of an interpretation that suits the system rendering it.
In a deployed digital twin, Order 2 begins where the demo avoided it. Sensors occlude each other. Some zones get sparser coverage. Fusion confidence drops when a worker walks behind an obstacle. The fused state continues to render the floor smoothly anyway. The data does not warrant the continuity; the continuity is what looks good on a screen. Operators come to trust the rendering more than the sparseness underneath justifies.
Baudrillard’s Watergate reading sits at this same order. The Nixon scandal performed the existence of political moral standards. The hearings, the resignations, and the outrage were treated as evidence that politics was a domain where moral standards existed at all. Baudrillard’s reading is that the standards had already become signs by then, and the scandal was not a violation of them but a reaffirmation of their existence by means of a publicised breach. The pattern recurs in any modern scandal cycle in which the staged remediation reasserts the legitimacy of the institution being remediated.
What Watergate is to political signs, the smoothed twin is to factory-floor signs. Both confidently project a richer underlying state than the evidence actually supports.
The engineering defence at Order 2 is order-aware UX with mandatory degradation. The dashboard must not present sparsely-supported regions with the same visual weight as densely-supported ones. This is not an aesthetic preference. It is a safety property. We can write it down as a rule:
# Pseudo-code rule. Visual weight is a function of evidence density, fusion confidence, and freshness.
def render_weight(zone):
density = zone.live_sensors_with_unoccluded_view / zone.expected_sensors
fusion_conf = min(track.confidence for track in zone.tracks)
freshness = min(track.freshness_ms for track in zone.tracks)
if density < DENSITY_THRESHOLD or fusion_conf < 0.7 or freshness > 500:
return { opacity: 0.5, outline: "dashed", aria_label: "low-evidence zone" }
return { opacity: 1.0, outline: "solid", aria_label: "live zone" }
The decision rule embedded here is mathematical, not advisory. A zone whose fusion confidence falls below 0.7, whose data is older than 500 ms, or whose contributing-sensor count falls below threshold is rendered translucent, full stop. There is no judgement call by the operator. The system makes the call structurally, in the same place every time.
A sharper test of Order-2 behaviour is what happens during route planning. A route through a zone with degraded fusion confidence should be flagged differently than a route through a fully-tracked zone, and the operator should be allowed to require a higher confidence floor before the route is committed to the fleet controller. A twin that lets the route planner work from a smoothed map without exposing the underlying confidence is, at the routing layer, already slipping toward Order 2.
The technical rule above is the easy half. The hard half is that operators tend to trust the smoothed render even when a drift number is rising on the same screen. Why that happens, and what to do about it in the rendering itself, is the subject of seduction in a later section.
NVIDIA instantiation. Inside a deployed Omniverse warehouse twin, Order 2 arrives when the polite assumption of 100 calibrated ceiling cameras meets a deployment that has fewer, occluded, or differently positioned ones. MTMC confidence drops when a worker walks behind a tall rack. The fused Metropolis occupancy map continues to render smoothly anyway. The render-weight rule above specialises here to threshold on Metropolis MTMC
track.confidenceand fusion freshness. The Order-2 routing test specialises to: a cuOPT route through a low-MTMC-confidence zone should be flagged differently than one through a fully-tracked zone, and the operator should be allowed to require a higher MTMC floor before the route is committed to Isaac Mission Control.
Order Three: Masking the Absence of Reality
The third order is where the framework does its sharpest work. The sign now pretends to point at something that no longer exists. It is a representation of nothing, dressed as a representation of something. The everyday case is the weather app in a windowless office: bright yellow sun on screen, pouring rain outside, sunglasses packed on the basis of a sign that is masking the absence of the state it claims to describe.
Baudrillard’s Disneyland reading sits here too. The park is not the fantasy enclosure inside an otherwise authentic America; it is the fantasy enclosure that exists to certify the rest of America as not-a-fantasy. By overtly declaring itself imaginary, it performs the existence of a real outside by contrast. The same move generalises to digital twins: any system that publishes a contained “fantasy zone” (the training sim, the synthetic-data corpus) while presenting its surroundings as authentic is doing the same work. The labelled artifice is the alibi for the unlabelled artifice everywhere else.
In a deployed twin, Order 3 looks like this: a sensor dropped hours ago, the fused map still displays the zone, drawing on the last successful track plus a schedule prior. Operators see a confident representation for which no current evidence exists. A fire could be breaking out while the twin, drawing on yesterday’s cached state, renders the zone green and idle.
The engineering defence at Order 3 has to start by giving the twin a way to say I do not know. Most engineering systems are constitutively unable to say this. They report a value or they fail. The “I don’t know” channel has to be added explicitly, and Dempster-Shafer evidence theory is the cleanest mathematical scaffolding for it. Each zone carries not just a belief mass but an ignorance mass: the share of probability the system has not committed.
# Pseudo-code rule. Ignorance is a first-class mass, not a guess.
zone_state = {
belief: { "worker_present": 0.4, "empty": 0.1 },
ignorance: 0.5, # we have no evidence to commit this 0.5 mass
last_evidence_at: "2026-05-31T11:08:42Z",
failed_sensors: ["sensor_071"],
fallback: "schedule_prior"
}
# Render rule applied in the operator view.
if zone_state.ignorance > 0.3 or (now() - zone_state.last_evidence_at) > 60_000:
render(zone_state, derivation="cached_or_schedule", opacity=0.4,
banner="evidence is stale; treat as unverified")
raise_advisory(zone=zone_state.zone, level="evidence_gap")
block_routing_through(zone_state.zone, until="evidence_returns")
The system refuses to project a clean worker_present or empty claim when the ignorance mass is large. The operator sees a translucent zone with a banner. The system also raises a dedicated evidence_gap advisory that cannot be suppressed at the same priority as routine alarms. Critically, route planning is blocked through any zone in the evidence_gap state until current evidence returns. A twin that quietly substitutes cached data for fresh data is not allowed to do so silently, and the routing layer is not allowed to commit autonomous vehicles or robots to paths that pass through evidence-gap regions.
The natural failure mode to instrument for is the silent sensor drop. A sensor goes offline. The fusion layer quietly drops it from the contributing set. The map keeps rendering. The advisory channel needs to fire on the drop event itself, not on the moment a downstream decision goes wrong.
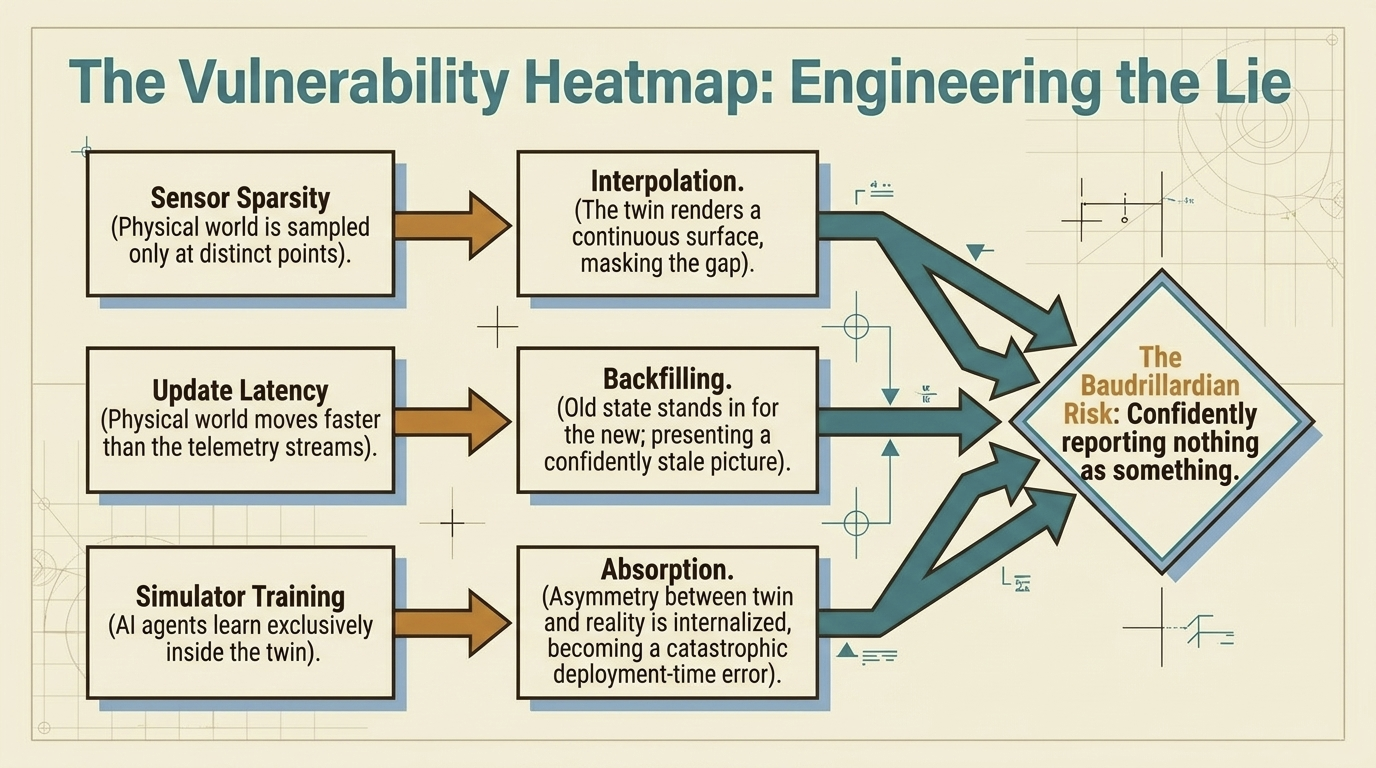
Figure. The three columns are not alternatives; they are a funnel. Each engineering gap on the left produces its own distortion mechanism in the middle, and all three pour into the same outlet on the right. The instrumentation lesson: defend the outlet, not the columns.
NVIDIA instantiation. Inside a deployed Omniverse twin, Order 3 looks like this: a ceiling camera in aisle 7 dropped its connection three hours ago. The Metropolis occupancy map still displays aisle 7. It is drawing on the last successful MTMC track, the AMR’s last reported pose, and a default model of “workers present here at this hour”. The Dempster-Shafer rule above specialises here to populate
failed_cameras(the NVIDIA reading offailed_sensors) and to triggerblock_routing_through(zone, requested_by="cuOPT", until="evidence_returns")against the cuOPT routing layer specifically. The instrumentation that matters most is the silent camera drop detector: when MTMC drops a camera from the fusion set, the advisory channel must fire on the drop event, not on the moment a downstream cuOPT routing decision goes wrong.
Order Four: Pure Simulation
If Order 3 is the system asserting evidence it does not have, Order 4 is the system arriving at a state where evidence has stopped mattering. The sign has no relation to any reality whatsoever; it is its own pure simulacrum. The system circulates in a closed loop, with signs referring only to other signs.
The cleanest example in industrial AI is the AI gym architecture: agents trained, evaluated, and tuned entirely inside the digital twin, then deployed to the physical fleet as a downstream rollout. For the operating team, the twin is the working reality where the optimisation actually happened. The physical site becomes the deployment target for decisions already made elsewhere.
This drift is not accidental. An agent training inside the simulator sees zero friction. No real trucks blowing tyres, no real weather delays. It can run ten thousand lifetimes in an afternoon. The physical world by comparison is slow and noisy. The optimisation is mathematically incentivised to tune the agent for the frictionless simulator and ignore the physical referent. The simulator quietly becomes the operational reality the agent has learned.
The engineering defence at Order 4 is realizability checking: testing not whether the twin’s internal state is locally consistent (most validators already do that), but whether the configuration the system is about to commit could exist as a physical thing in the deployment footprint. Constraint networks over qualitative spatial calculi like RCC-8 have a known gap between path-consistency (the cheap local check) and global satisfiability (the expensive global property). A path-consistent network can still have no physical realisation. Routing plans on a digital twin routinely fall into this gap.
# Pseudo-code rule. Local consistency does not imply global realizability.
def validate_routing_plan(plan, physical_footprint):
if not local_consistency_check(plan):
return reject(plan, reason="local_inconsistency")
if not global_realizability_check(plan, embedding=physical_footprint):
return reject(plan,
reason="path_consistent_but_no_3D_realisation",
advisory="possible Penrose ontology in routing graph")
return accept(plan)
The realizability layer is the part that catches what we might call Penrose ontologies: configurations whose every pairwise constraint is locally satisfiable but whose global geometry has no realisation in physical space. Escher’s impossible staircases are the canonical example. Inside an industrial twin, a routing plan can be locally legal at every node and still impossible to lay down on the actual physical footprint. A typical instance: the routing graph has a permanent obstacle in the physical world (a structural pillar, a fixed conveyor) that the simulator’s scene did not encode, and the proposed path goes straight through it. The twin should not be allowed to issue the plan to the physical fleet before the realizability layer has signed off on the embedding.
The deeper failure mode to instrument for is simulator-to-physical drift. The agent has been trained inside the simulator, but the simulator’s friction parameters, lighting, sensor noise model, and obstacle layout have all drifted from the physical site over time. The agent has learned the simulator. When it is deployed, its behaviour assumes a world that no longer matches the floor. Realizability checking at deployment time is the last layer that catches this. The check is not optional; it is the rule that prevents the AI gym from being deployed as if it were the world.
The technical defence above protects the deployment, but does nothing about the operator. What happens when a natural-language interface inside the AI Gym produces more confident sentences per minute than the operator can audit, is the subject of the implosion of meaning in a later section.
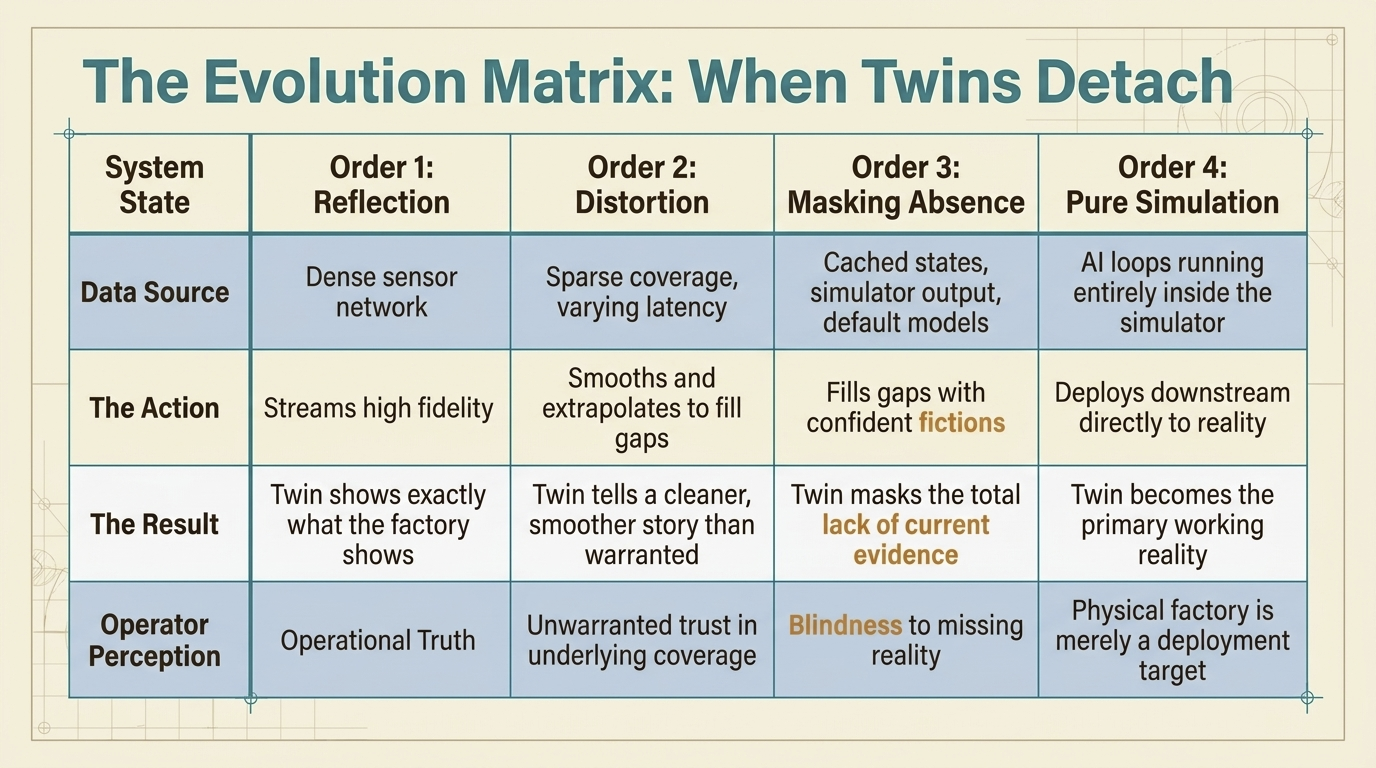
Figure. Scan by column, not by row. The data-source column tells you what the system is actually reading. The operator-perception column tells you what the operator sees. The gap between those two columns widens as you read down; the operator’s experience stays roughly the same the whole way.
NVIDIA instantiation. The NVIDIA AI Gym is the cleanest concrete example of Order 4 in industrial AI today. Omniverse provides the simulation environment. Metropolis fuses the simulated cameras. cuOPT plans the routes. Isaac runs the perception and the mission control. The four together let AMR routing agents be trained, evaluated, and tuned entirely inside Omniverse, then deployed to the physical fleet through Isaac Mission Control. The realizability rule above specialises to validating a cuOPT routing plan against the actual warehouse footprint and rejecting paths that pass through structural pillars or fixed conveyors that the Omniverse scene did not encode. The NVIDIA-specific drift to instrument for is Omniverse-to-physical drift: when Omniverse’s friction, lighting, or obstacle layout has drifted from the real warehouse, Isaac Mission Control should refuse to deploy a policy trained against the older Omniverse scene without a fresh realizability pass.
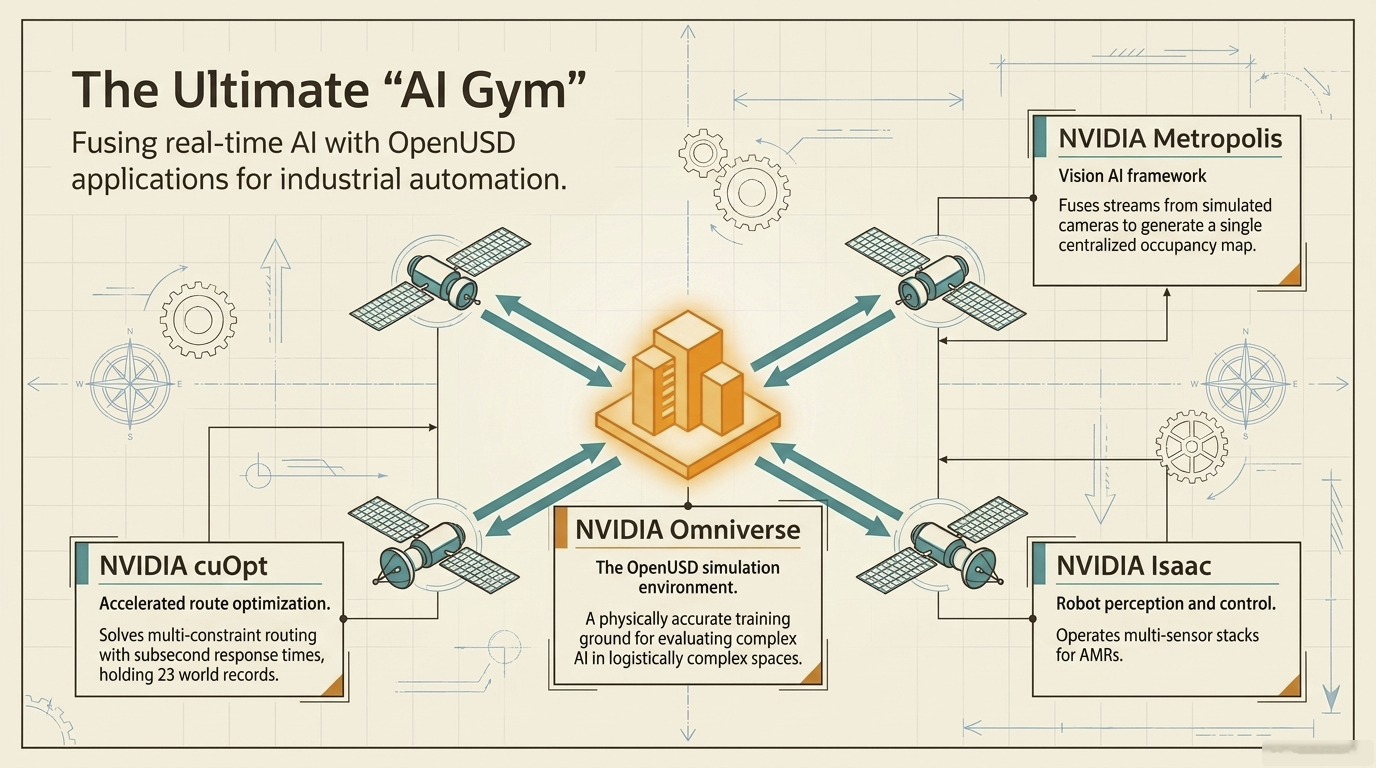
Figure. The Ultimate AI Gym stack. NVIDIA Omniverse provides the OpenUSD simulation environment. NVIDIA Metropolis fuses streams from simulated cameras into a single centralized occupancy map. NVIDIA cuOPT handles accelerated routing optimization with sub-second response times. NVIDIA Isaac runs robot perception across multi-sensor stacks. The four together let developers train and evaluate complex AI agents inside a physically accurate digital twin before any robot touches the real factory floor.
Seduction and the Implosion of Meaning
The four orders cover the technical drift of the twin. Two further vulnerabilities are harder to defend against because the engineering literature names them less often.
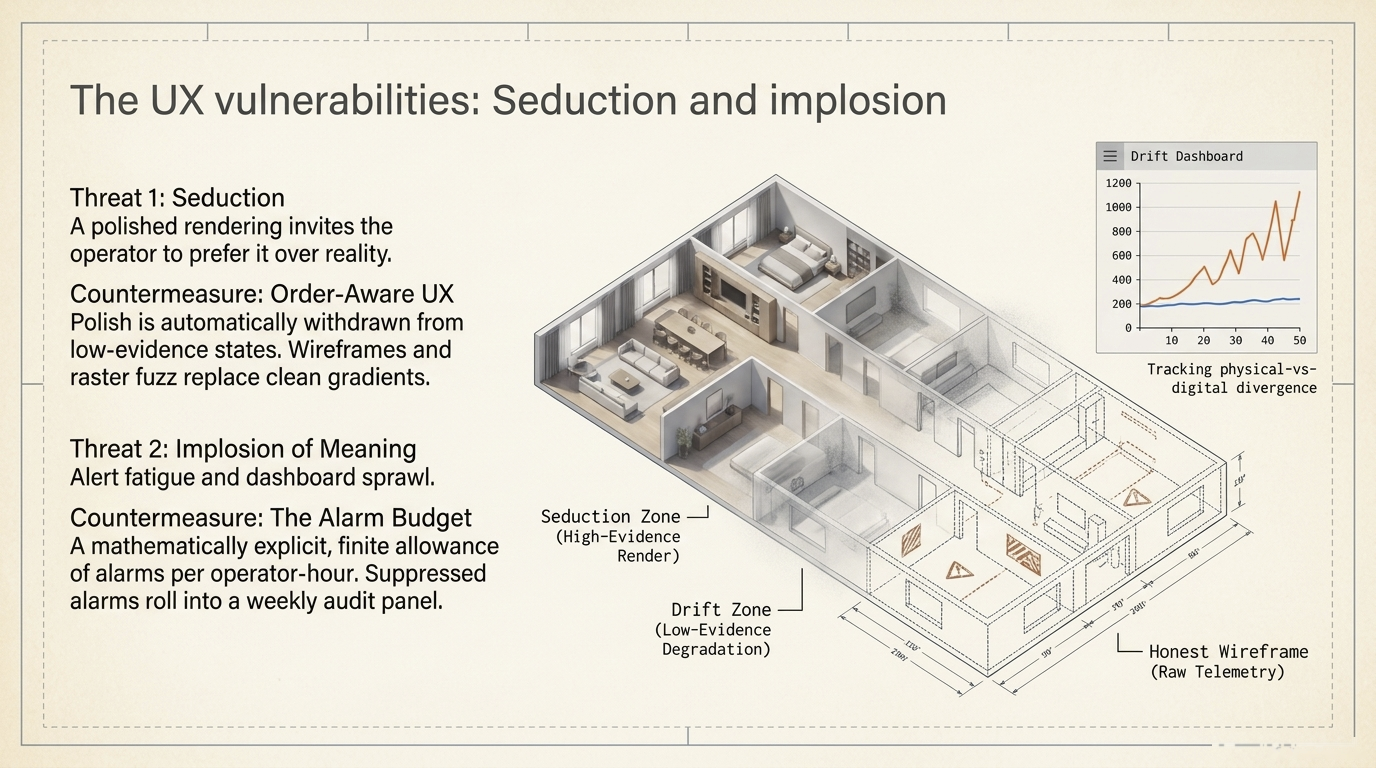
Figure. The render style is itself the honesty channel. Where the polish is high, the data warranted the polish. Where the polish drops to wireframe, the operator gets the warning in the rendering rather than in a side panel they have to remember to check. Polish is doing the work an alarm would, only earlier and without language.
Seduction
The first is seduction. A polished rendering does not just communicate state; it invites the operator to prefer it. The smoothed surface of the digital becomes more pleasant to inhabit than the noisy surface of the physical, and attention migrates whether the data warrants the migration or not. Drift instrumentation alone is insufficient: the operator can see the drift number rising and still trust the more pleasant rendering. The defence has to be embedded in the rendering itself.
There is a boardroom problem behind this. An engineer who has just spent $50M on a sleek twin and walks into the executive review explaining that the dashboard has been designed to look worse whenever the data is uncertain will not get a warm hearing. The frame has to change. Dynamic visual degradation is not an aesthetic choice; it is a safety feature. A $50M twin that confidently reports a sector as safe when its sensors for that sector have been offline for hours is functionally dangerous, regardless of how it looks at 60 fps. The ugly wireframe is the operational maturity. To override it is to override a safety property.
# Pseudo-code rule. Polish degrades with evidence. No exceptions.
def ui_element_for(state):
if state.ignorance > 0.3 or staleness(state) > LATENCY_BUDGET:
return wireframe(
style="dashed",
opacity=0.4,
fill="raster_fuzz",
polish_features=DISABLED # no shadows, no animations, no smoothing
)
if state.evidence_strength == "indirect":
return semi_polished(opacity=0.7, animations=DISABLED)
return fully_polished(state)
When the data is uncertain, polish is withdrawn automatically. Shadows turn off, animations stop, the fill becomes raster fuzz. No engineer is in the loop choosing whether; the rule does it.
The Implosion of Meaning
The second vulnerability is what Baudrillard calls the implosion of meaning. As signs proliferate and refer to other signs, distinctions between them collapse, and the operator loses the ability to discriminate a signal that matters from one that does not. In digital-twin terms: alert fatigue, dashboard sprawl, the operator who acknowledges all alarms identically because none is reliably tied to a discriminable physical state.
Natural-language query interfaces amplify this. A system that produces a confident sentence for every query has scaled meaning production faster than the operator can absorb it. The countermeasure is not richer instrumentation. Richer instrumentation accelerates the implosion. The countermeasure is aggressive, mathematically-backed curation. Over-instrumentation should be treated as a Baudrillardian failure mode, not as rigour.
# Pseudo-code rule. Alarm budget is a finite, audited resource.
ALARM_BUDGET_PER_OPERATOR_HOUR = 12
for alarm in candidate_alarms:
alarm.utility = (
alarm.physical_consequence_severity *
alarm.discriminability *
alarm.actionability
)
# Cull below the budget threshold.
ranked = sort_descending(candidate_alarms, by="utility")
displayed = ranked[: ALARM_BUDGET_PER_OPERATOR_HOUR]
suppressed = ranked[ALARM_BUDGET_PER_OPERATOR_HOUR :]
# Suppressed alarms are not deleted. They roll up into a single
# audited "low-signal events" panel reviewed weekly, not minute-by-minute.
log_suppression(suppressed, reason="alarm_budget_culling")
The budget is explicit and finite: anyone who wants to add an alarm has to displace one. Utility is measured, not asserted. Suppressed alarms are audited, not silently dropped. The constraint the framework models is human attention, not rendering bandwidth. A twin without this protocol is not production-ready; it has implicitly delegated curation to exhausted judgement, which is not a place to delegate anything safety-critical.
NVIDIA instantiation. The Omniverse renderer is unusually good at the seduction failure mode because it is unusually good at rendering. The polished surface that makes the demo land on stage is the same polished surface that quietly persuades operators to trust the dashboard even when the underlying MTMC tracks have dropped to low confidence. The polish-degrades-with-evidence rule applies to Omniverse rendering directly: shadows, animations, and smoothing on Metropolis-derived overlays must be disabled when the underlying ignorance mass exceeds the threshold. On the implosion side, the Visual Insight Agent is the most likely amplifier; the alarm-budget rule above is what keeps a
VIAdeployment from producing more confident sentences per minute than the operator can absorb.
An Engineering Checklist for Honest Twins
Collected into one place, the rules from the four Order sections and the two UX sections become a six-item checklist for what we call the honest twin architecture. Each item is keyed to a specific Baudrillardian failure mode. The checklist is generic; the NVIDIA instantiations of each item live in the sidebars above.
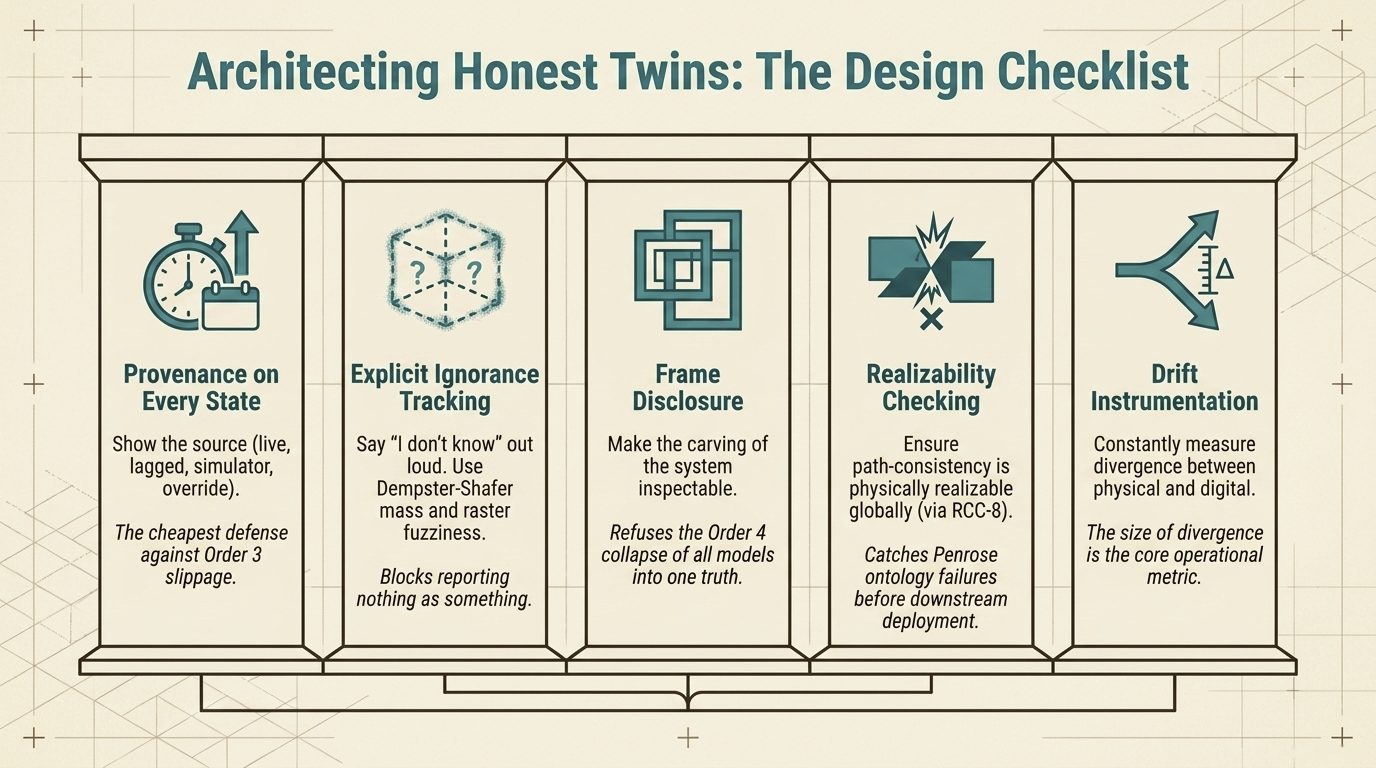
Figure. Each column is a defence keyed to a specific Order. A twin that ships without a column has the corresponding Baudrillardian failure mode unaddressed. Read as a matrix, not a list. The article adds a sixth practice (alarm-budget curation) in the body for the seduction and implosion failure modes that the original five do not cover.
-
Provenance on every state. Every quantity inside the twin carries its source (which fused track, which sensor reading, which route step), its derivation type, and its freshness timestamp. The UI renders these alongside the value. Defends against Order 3.
-
Explicit ignorance tracking. Where the twin does not know, it says so. Dempster-Shafer mass on ignorance, raster fuzziness on regions, time-since-last-update on entities. Evidence-gap advisories at the same priority as operational alarms. Routing blocked through evidence-gap zones. Defends against Order 3.
-
Frame disclosure. Any twin is a particular carving of the physical system. The operator view makes the carving inspectable. The operator can ask which model is in use (which tracker version, which routing objective) and which alternative carvings would produce different decisions. Defends against Order 4.
-
Realizability checking. A path-consistent routing plan is not necessarily a physically realisable routing plan. A global realizability check at design time refuses Penrose-ontology configurations (locally legal, globally impossible on the actual footprint) before they reach the fleet controller. Defends against Order 4.
-
Drift instrumentation, presented as a first-class panel. The size and location of the divergence between the twin and the physical site are measured continuously and presented in a panel of the same priority as the twin itself. Not a backend log. Defends against the cumulative drift between Order 2 and Order 4.
-
Order-degraded polish and alarm-budget curation. Polish is automatically withdrawn from low-evidence states. The alarm budget per operator-hour is explicit, finite, and audited. Suppressed alarms roll up into a low-signal panel reviewed weekly. Defends against seduction (item 6a) and the implosion of meaning (item 6b).
The checklist runs from the data layer (1, 2) through the model layer (3, 4) to the operator layer (5, 6). A twin that omits any one has the corresponding Baudrillardian failure mode unaddressed. The order-to-defence pairing is intentional: in a real engineering review, the team can point at a specific failure mode rather than a generic call for “more rigour”.
Concluding Remarks
We started with wooden pallets repainted in neon green to suit the dashboard. We can now read that story honestly: the factory has been modified to fit its representation. The map is dictating the territory. The neon-green paint is Baudrillard’s precession of simulacra rendered in literal pigment.
That is the small version of the story. The large version is the one that should keep us awake. As highly optimised digital twins like NVIDIA’s Omniverse warehouse demo become the primary surface for industrial, civic, and personal decisions, how long until physical reality is rebuilt at scale to make itself easier for the dashboards to render? Warehouses arranged to suit the camera placements that feed Metropolis rather than to suit the workflow. Cities laid out for the model rather than for the people who live in them. Personal lives shaped for the curated digital footprint rather than for the moments that footprint represents. If the filter requires a smoother surface to render properly, the long-run option available to the system is to sand down reality.
A fair reader will notice the six-item checklist can be derived from observability engineering, MLOps, and human-factors engineering without invoking Baudrillard at all. Provenance is data lineage. Explicit ignorance is uncertainty quantification. Realizability checking is constraint satisfaction. Each item has its own literature. What the philosophical framing adds is not the practices but a unifying diagnostic that names what the practices defend against, and a shared vocabulary the team can use across disciplines. Treating a Metropolis camera drop as an Order-3 sign is a category that travels between rooms; “MTMC fusion-set membership change” is not. The framework is an interpretive layer over engineering work that already exists.
The engineering checklist we walked through is the defence against this. It is not an aesthetic preference. It is an architectural commitment to render the twin honestly, to make explicit ignorance a structural property of the system rather than a UX afterthought, and to refuse to ship configurations that are locally legal but globally impossible on the actual floor. The discipline is what keeps the twin a representation, rather than a quiet replacement of the reality it was meant to describe.
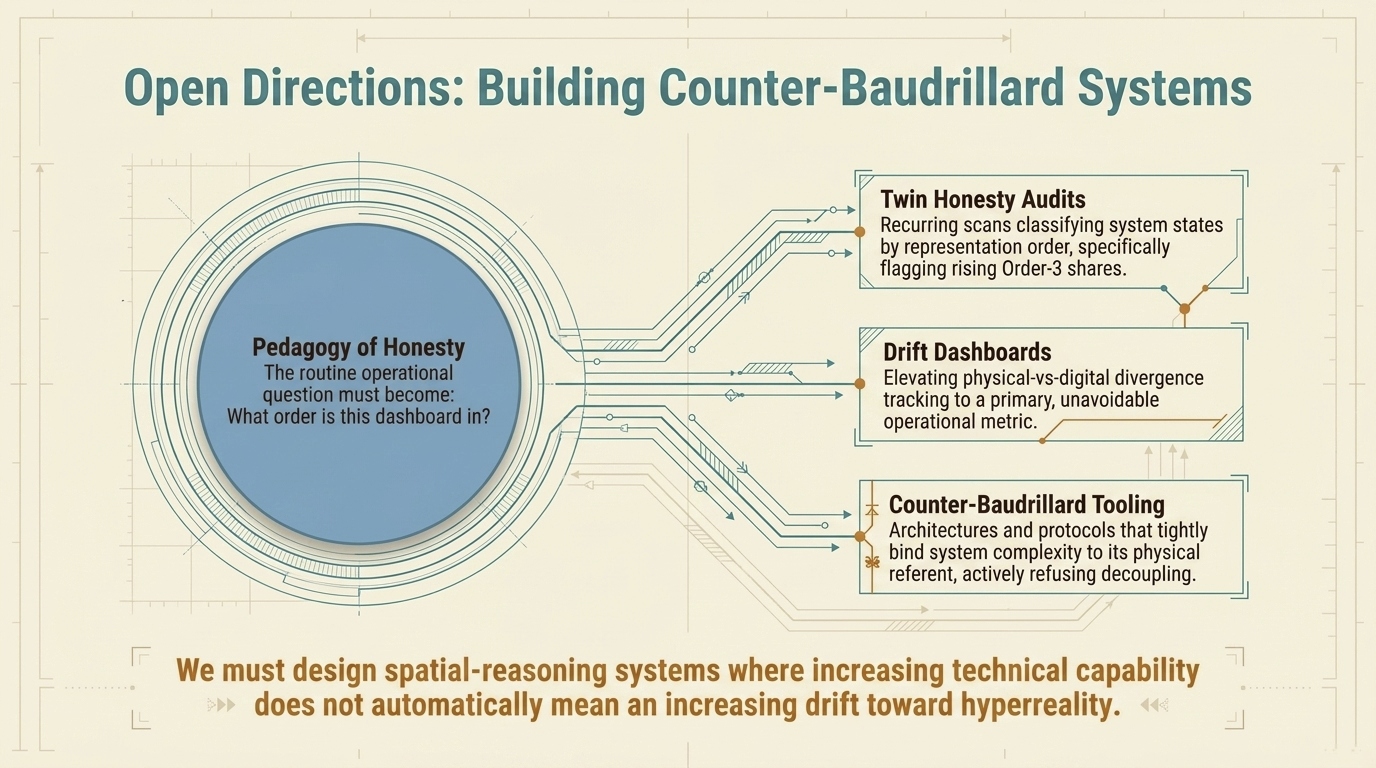
Figure. The orbits do nothing without the centre. Without the operating team trained to routinely ask “what order is this dashboard in?”, twin honesty audits become checkbox exercises, drift dashboards become wallpaper, and counter-Baudrillard tooling becomes shelfware. Invest in the centre first; the orbits earn their keep only afterwards.
The framework is not only for engineers working on industrial twins. The same diagnostic question, which of the four orders is this sign currently operating in, is a cheap critical-thinking instrument for navigating any information environment denser in signs than in physical references. The work of asking it does not stop at the warehouse door.
References
- Jean Baudrillard, Simulacra and Simulation, trans. Sheila Faria Glaser, University of Michigan Press, 1994 (orig. Simulacres et Simulation, Éditions Galilée, 1981). The primary text: four orders, precession of simulacra, hyperreality, Disneyland and Watergate.
- Jean Baudrillard, The Gulf War Did Not Take Place, Indiana University Press, 1995. Sharpest application of the Order-3 / Order-4 distinction.
- NVIDIA, Fusing Real-Time AI With Digital Twins, GTC keynote demo, 26 March 2024.
- Adam Scraba, Staying in Sync: NVIDIA Combines Digital Twins With Real-Time AI for Industrial Automation, NVIDIA Blog, 18 March 2024.
- NVIDIA, cuOPT Route Optimization.
- David A. Randell, Zhan Cui, Anthony G. Cohn, A Spatial Logic Based on Regions and Connection, KR’92, 1992. Foundational reference for RCC-8 (used in the Order 4 realizability check).
- Jochen Renz, Bernhard Nebel, On the Complexity of Qualitative Spatial Reasoning: A Maximal Tractable Fragment of the Region Connection Calculus, Artificial Intelligence 108, 1999. Formal basis for the Penrose ontology failure mode.
- Glenn Shafer, A Mathematical Theory of Evidence, Princeton University Press, 1976. The Dempster-Shafer foundation for the Order 3 ignorance-mass defence.
- Richard J. Lane, Jean Baudrillard, Routledge Critical Thinkers, 2000. Readable secondary introduction for engineers.